AI DESIGN &
HRI - HUMAN-ROBOT INTERACTION

True design of AI. Goal: Stop the robots from scaring shoppers while maneuvering confidently and with obvious intent.
The problem was that the behaviour of the robot seemed erratic, random, and sometimes agressive to shoppers. Our first move was to implement a DMOD (Dynamic Moving Obstactle Detector) where the robot can sense when a person is present, and change it's behaviour accordingly (e.g. slower approach speed, waiting longer, slower startup speed, etc.). This resulted in the robot behaving much less scary motions. It was almost to the point that the robot was too timid, annoying shoppers that just wanted to yield right-of-way to it and for it to go, as seen in this video:

Part of the goal was for the robot to be "invisible" meaning that shoppers and workers would not pay it any attention, as seen here:
Sams Club, Lemon Grove, CA
2021 October 5

ON-ROBOT TOUCHSCREEN WORKFLOW

ITERATE AND ITERATE
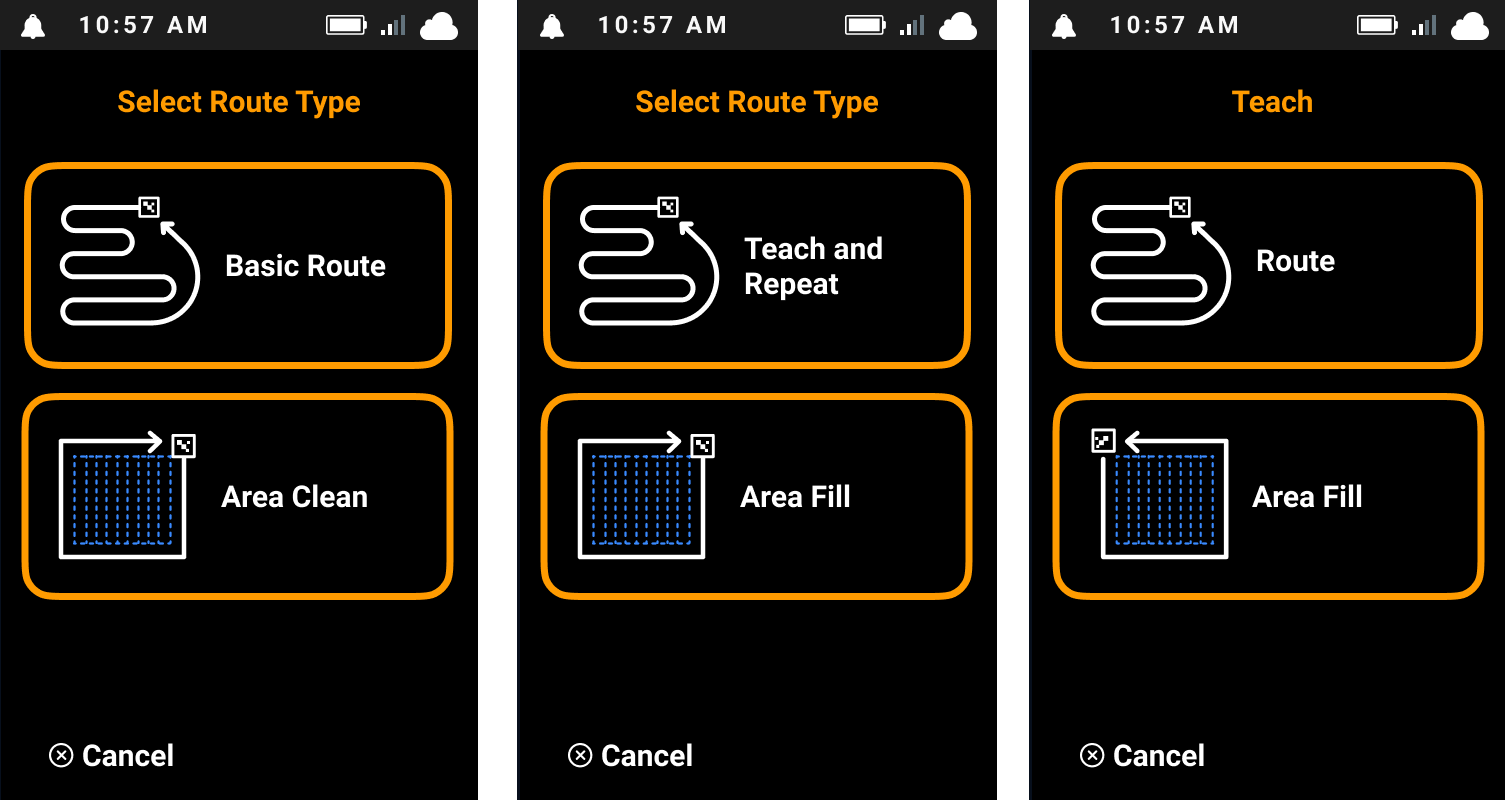
Area Fill was a new feature where instead of teaching the exact path that you want the robot to clean, you just drive it around the perimeter of a wide open space. It then intelligently fills-in the interior, saving 80% of the time it would take to teach the route traditionally.
- Area Border vs. Area Clean
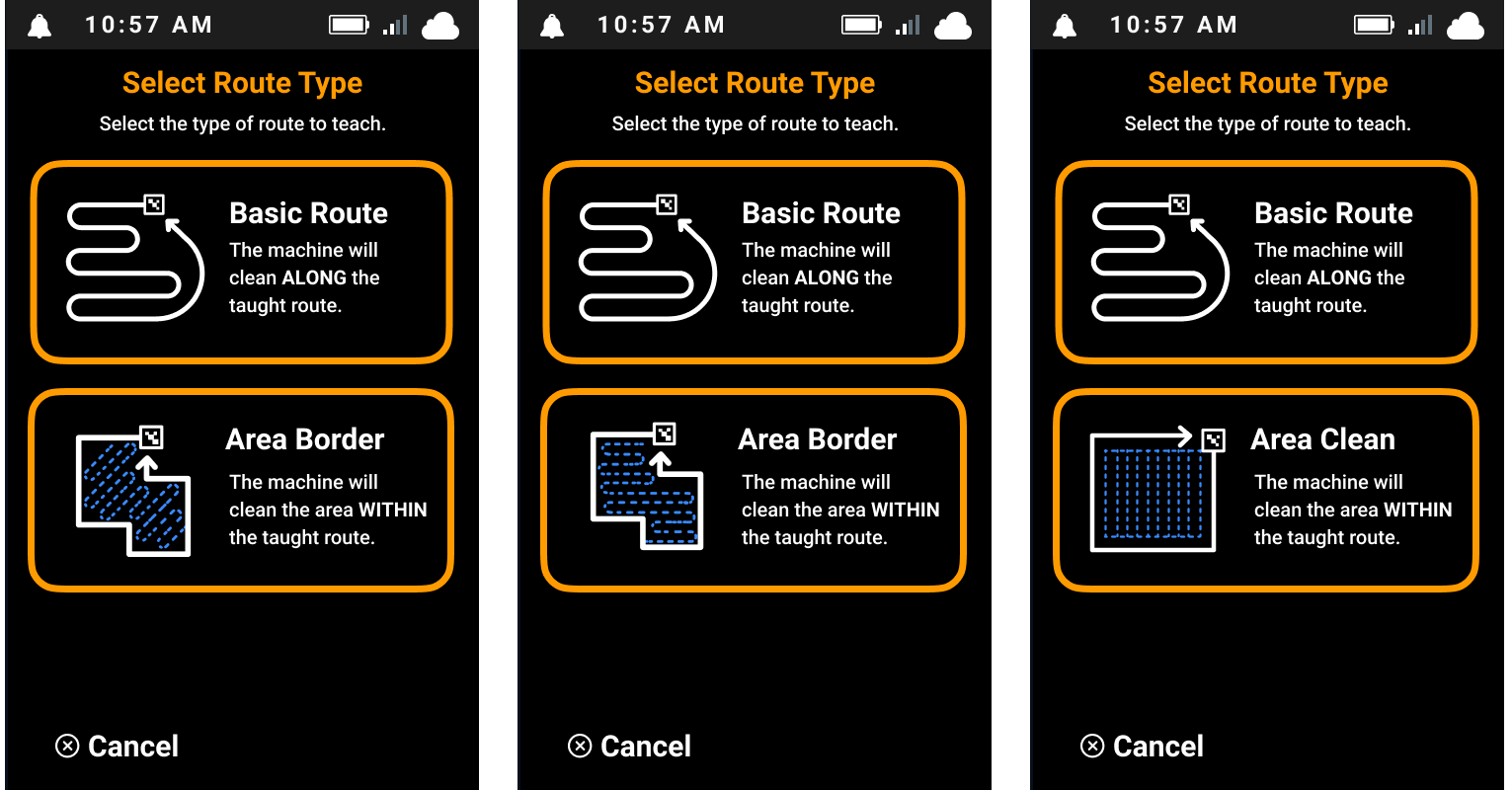
- ALONG (for Basic Route) vs. WITHIN (for Area Border)
- Tetris-style icon (jagged) vs. simple square for Area Clean
- Studied the actual path of filling in an area and it is NOT zig-zag as seen in the first 2 blue lines to the right. It is "floating rectangle" aka "zamboni style."
AND ITERATE SOME MORE
After extensive research with Operators, Subject Matter Experts (for Industrial Spaces), and employees, I arrived at a much simpler design.
- Basic Route with Area Clean made it seem like Basic Route would not be cleaning the floors.
- Teach and Repeat with Area Fill made it seem like there is no teaching involved with Area Fill.
- Winner was Route with Area Fill for the best balance and clarity.
- Aligned the Home Marker (HM, basically a special QR code) with the perimeter line, seperated it from start of line.
- Switched the direction of the Area Fill path to be counter-clockwise to better reflect real world behaviour (all HM's are scanned from the right side RGB camera).